简介
IIC-电机/舵机驱动模块是一款兼容Arduino、ESP8266、ESP32和树莓派的电机驱动模块。
通过IIC的方式和主控板进行通讯,这样可以大大减少主控芯片引脚的占用。
同时模块可以同时支持驱动四个直流电机和四个舵机,并且实现直流电机的正反转和电机调速控制。模块可以外部供电,为舵机提供5V电压,输出电流最大能够达到5A,足以驱动如MG995等大舵机。
模块具有体积小、重量轻、占用IO数量少、功能强大、驱动能力强、不易发热等诸多优点。常用于机器人小车的多路直流电机或者多路舵机的驱动中。
参数
通信方式:IIC
建议电源电压(VIN,GND):6V-12V
舵机驱动部分电压:5V(板载DCDC电源芯片)
舵机驱动部分峰值电流:5A(建议持续工作电流小于3A)
单路电机驱动电流平均值:1.2A
单路电机驱动电流峰值:1.6A
静态电流:10mA
驱动的舵机数:4路
驱动的直流电机数量:4路(带正反转和12位高精度调速)
固定方式:4个M2固定孔(直径2mm)
引脚说明
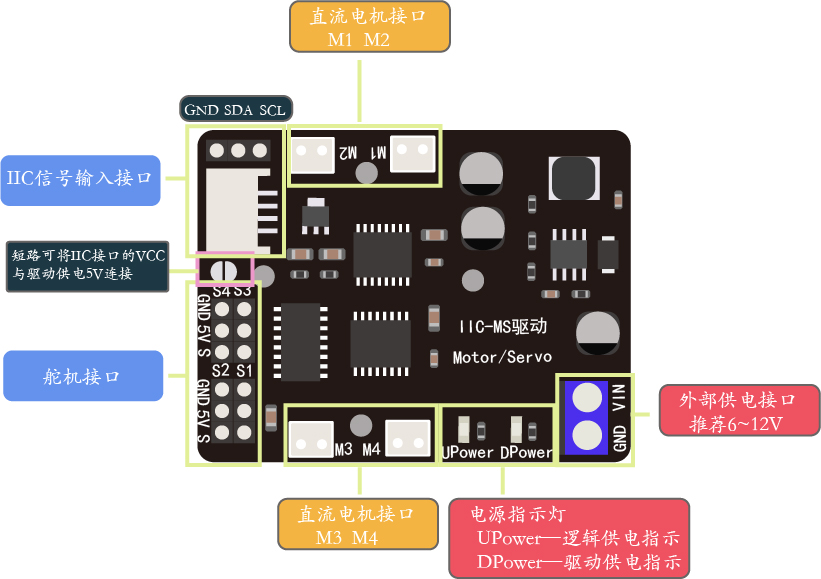
IIC信号输入接口:与arduino、wifiduino、micro:bit、树莓派等主板进行IIC通信
跳线:IIC输入接口中的+引脚没直接与板载5V导通,这是为避免电机驱动模块电源对主板产生干扰。跳帽焊接短路后,将IIC接口的+与板载5V连接,此时电机驱动模块可为主板提供5V电源。
舵机接口:连接舵机,可支持4路舵机
直流电机接口:连接直流电机,可支持4路直流电机
电源指示灯:DPower为舵机接口电源指示灯,UPower为驱动芯片逻辑供电电源指示灯。
外部供电接口:用于外接电池或其他电源,推荐电压6~12V
示例程序
#include <Wire.h>
#include "Openjumper_IICMotorDriver.h"
Openjumper_IICMotorDriver pwm = Openjumper_IICMotorDriver();//默认地址为0X40
//Openjumper_IICMotorDriver pwm = Openjumper_IICMotorDriver(0X41);//也可以这样自定义地址
#define SERVOMIN 100 //舵机脉冲最小值
#define SERVOMAX 400 // 舵机脉冲最大值
void setup()
{
Serial.begin(9600);
Serial.println("16 channel Servo test!");
//Wire.begin(D4,D5);//IIC引脚,库中已经声明
pwm.begin();
pwm.motorConfig(DIRP,DIRP,DIRN,DIRN);//DIRN小车前进方向定义,分别是M1、M2、M3、M4
// pwm.setPWMFreq(60); // Analog servos run at ~60 Hz updates频率
}
void loop()
{
pwm.setMotor(M3, 1000);//单独驱动一个电机参数一:固定为M1,M2,M3,M4为电机标号;参数二:-4095~4095为电机转速。正为正转,负为反转。
delay(500);
pwm.setAllMotor(3000);//同时设定所有电机速度,参数:-4095~4095为电机转速
delay(500);
pwm.setAllMotor(3000, 1000, 1000, 100);//同时设定所有电机速度,参数分别为M1,M2,M3,M4电机的转速:-4095~4095
delay(500);
pwm.stopMotor(MAll);//停止所有的电机
delay(500);
pwm.digitalWrite(2,HIGH);//输出高电平
pwm.setServoPulse(1, 200);//控制舵机转到对应角度,输出脉冲值
delay(1500);
pwm.setServoPulse(1, 300);
pwm.digitalWrite(2,LOW);//输出低电平
delay(1500);
pwm.digitalWrite(S3,HIGH);//引脚写1,2,3,4或S1,S2,S3,S4均可
delay(1500);
pwm.digitalWrite(S3,LOW);
}