
概述:
GP2D12 是一款Sharp公司生产的红外线测距传感器,广泛应用在各个领域。 Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束 会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以 及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。 此传感器可以用于机器人的测距、避障以及高级的路径规划,是机器视觉及其应用领域的不错选择。
技术参数:
- 型号:2Y0A21
- 电压:4.5-5.5V
- 电流:33-40mA
- 端口:模拟量
- 检测距离:20-150cm
产品特性
- 模拟量输出,需要有AD转换器的单片机控制
- 输出与距离成反比非线性关系
- AD位数越高测距效果越精确,10位AD可达0.1cm
- 基于三角测量法原理
- 工作温度 -10℃~+60℃
- 模拟输出噪声:<200mV
- 峰值功耗:约200mA
- 更新频率/周期:25Hz/40ms
型号对比:
目前Sharp的红外线传感器有如下几种类型:
GP2D02 (串口输出)探测范围 10cm-80cm
GP2D05 (数字输出)探测范围 固定的24cm
GP2D12 (模拟输出)探测范围 10cm-80cm
GP2D15 (数字输出)探测范围 24cm GP2D120 (模拟输出)探测范围 4cm-30cm
GP2YOAO2YK (模拟输出)探测范围 20cm-150cm GP2Y0D02YK (数字输出)探测范围 80cm
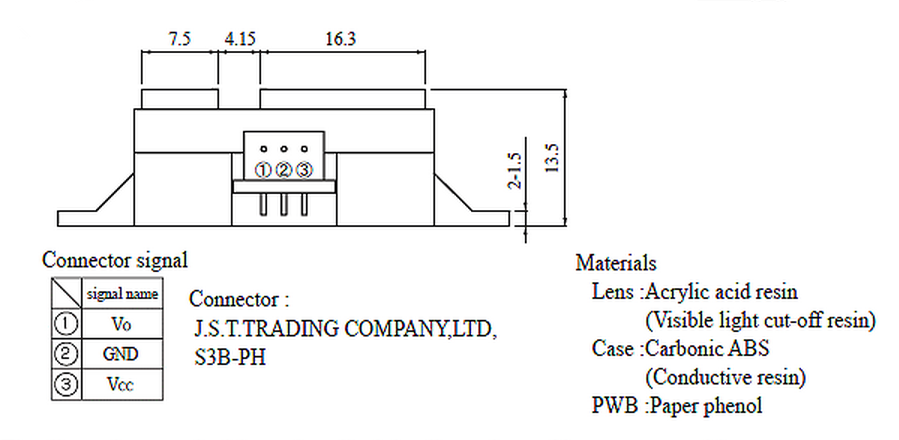
引脚定义图:
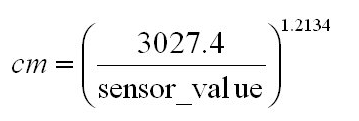
Arduino驱动示例: 示例为距离检测,距离转换公式:
示例一:
int ir_sensor = A0;
void setup() {
//initialize serial communications at 9600 bps
Serial.begin(9600);
}
void loop() {
int sensor_value = analogRead(ir_sensor); //read the sensor value
int distance_cm = pow(3027.4/sensor_value, 1.2134); //convert readings to distance(cm)
Serial.println(distance_cm); //print the sensor value
delay(500);//delay 500ms (0.5 second)
}
示例二:读取100次检测数据,输出平均值
int ir_sensor = A0;
void setup() {
//initialize serial communications at 9600 bps
Serial.begin(9600);
}
void loop() {
int distance = average_value(100); //loop 100 times and get its average
Serial.println(distance); //print the sensor value
delay(500);//delay 500ms (0.5 second)
}
int average_value(int average_count) {
int sum = 0;
for(int i=0; i<average_count; i++) {
int sensor_value = analogRead(ir_sensor); //read the sensor value
int distance_cm = pow(3027.4/sensor_value, 1.2134); //convert readings to distance(cm)
sum = sum + distance_cm;
}
return(sum/average_count);
}
其他文档: 手册:GP2Y0A21YK0F