概述
该多功能电机驱动扩展板是 IIC-电机/舵机驱动模块的升级款。同样是一款兼容Arduino UNO、wifiduino32的电机驱动模块。
将它与主控板扣合好,通过IIC的方式和主控板进行通讯,这样可以大大减少主控芯片引脚的占用。其中未使用到的引脚也全部引出,作为传感器接口使用。引出了4P的一路硬串口、一路软串口、一路超声波接口和一路IIC接口。同时未使用的模拟引脚用排母引出,靠右可用作OLED接口使用。
同时模块可以同时支持驱动四个直流电机和四个舵机,并且能实现直流电机的正反转和电机调速控制。模块自带一个DCDC转换电路,为舵机提供5V电压,输出电流最大能够达到5A,足以驱动如MG995等大舵机。
模块自带一个蜂鸣器、红外接收头和PS2手柄座,方便使用。相比 IIC-电机/舵机驱动模块 ,它具有两路编码器电机驱动功能。具有占用IO数量少、功能强大、驱动能力强、不易发热等诸多优点。常用于机器人小车的多路直流电机或者多路舵机的驱动中。
参数
通信方式:IIC
建议电源电压(VIN,GND):6V-12V
舵机驱动部分电压:5V(板载DCDC电源芯片)
舵机驱动部分峰值电流:5A(建议持续工作电流小于3A)
单路电机驱动电流平均值:1.2A
单路电机驱动电流峰值:1.6A
静态电流:10mA
驱动的舵机数:4路
驱动的直流电机数量:4路(带正反转和12位高精度调速)
电机接口类型:4*2.54防反接端口(或两个2.54*6排针带编码器电机接口)
板子其他接口资源:PS2遥控器接口、KF301电源接口、 7路传感器接口、一路硬串口、一路软串口、一路IIC接口、一路超声波接口、一个OLED接口和两路模拟接口。
端口说明
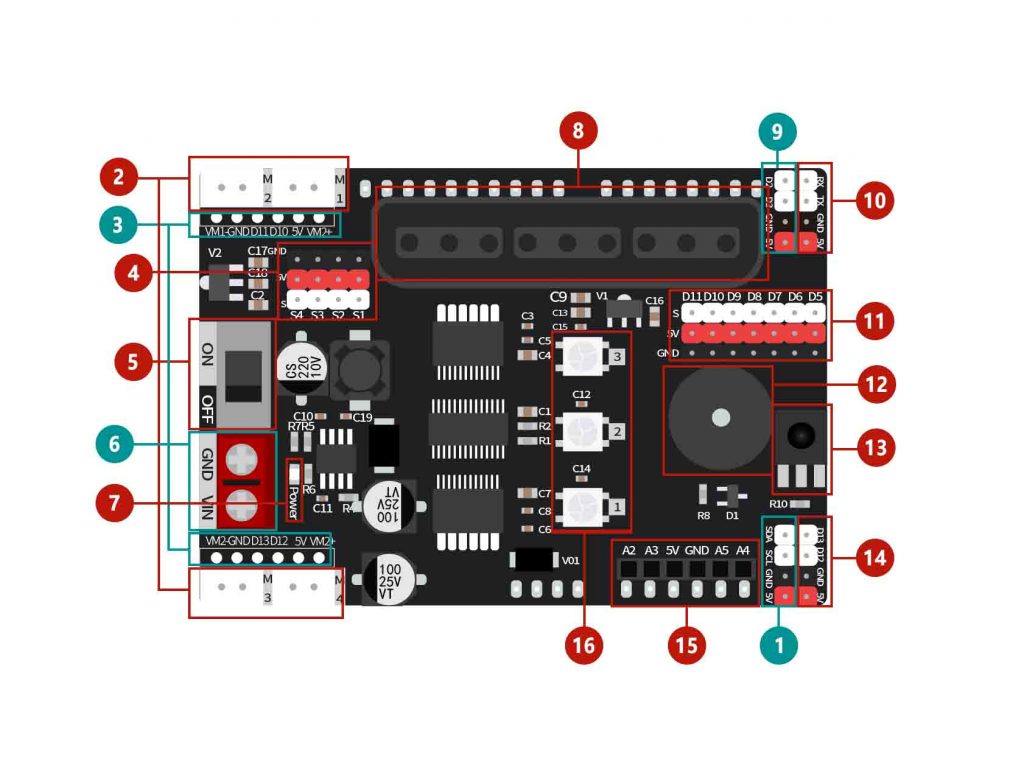
1.IIC信号输入接口: 与IIC通信模块进行连接通信
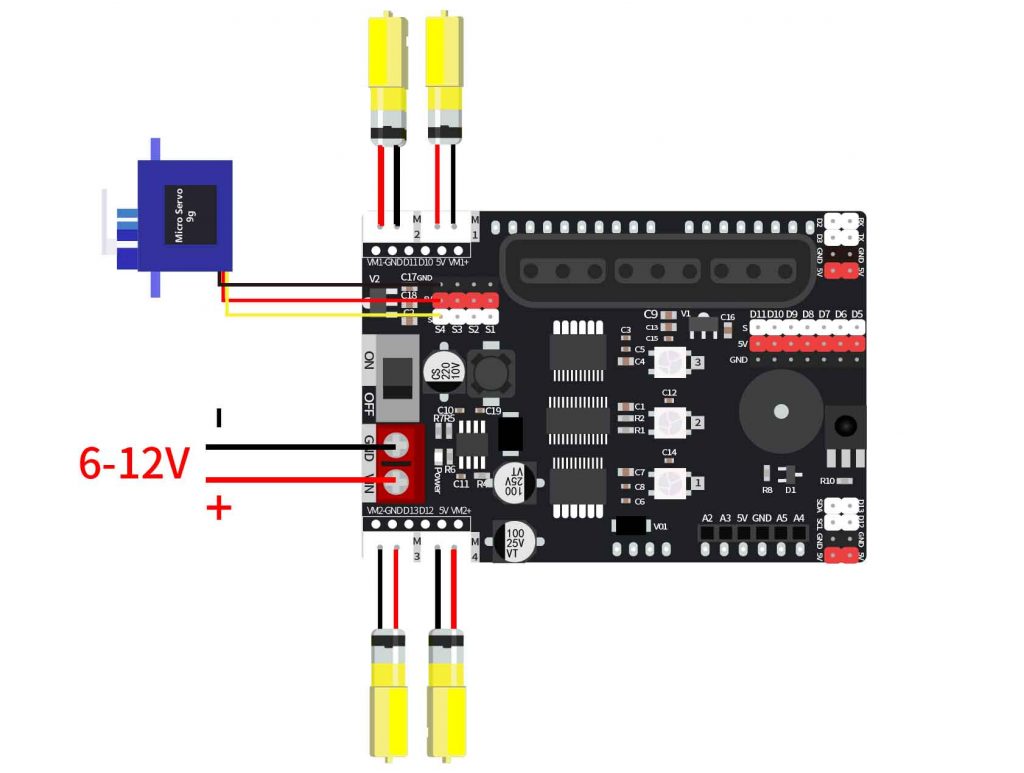
2.直流电机接口: M1、M2、M3、M4,连接直流电机,可支持4路直流电机
3.两路编码器接口 不与直流电机接口同时使用
4.舵机接口: S1、S2、S3、S4,连接舵机,可支持4路舵机
5.电源开关: 控制整个扩展板电源通断
6.外部供电接口: 用于外接电池或其他电源,推荐电压6~12V
7.电源指示灯Power
8.PS2手柄座: 可连接遥控器、手柄,在智能小车中,可以通过连接遥控器控制车
9.4P排针接口: 可作为软串口使用、也可作为4P传感器接口
10.串口接口: 可进行串口通信,与arduino的硬件串口连接
11.传感器接口: D5~D11,将主板未使用到的引脚全部引出,作为传感器接口使用,扩展出更多的功能
12.蜂鸣器: 发出提示声或警报声,播放声音,默认连接arduino的A0引脚
13.红外接收器: 可用于产品所需的红外控制,默认连接arduino的D4引脚
14.4P排针接口: 默认连接arduino的D12 D13引脚,可以用于连接超声波等模块
15.模拟排母接口: 从左到右分别为 A2 A3 5V GND A5 A4,靠右可接OLED模块
16.ws2812指示灯: 默认连接arduino的A1接口
电机、舵机测试
测试程序
/*电机驱动扩展板测试程序,电机+舵机
OpenJumper
*/
#include "Openjumper_IICMotorDriver.h"
Openjumper_IICMotorDriver pwm = Openjumper_IICMotorDriver();
#define SERVOMIN 100 // 舵机角度最小值
#define SERVOMAX 400 // 舵机角度最大值
#define Server1 1//分别对应板子上的S1-S4的4个舵机接口
#define Server2 2
#define Server3 3
#define Server4 4
void setup() {
Serial.begin(9600);
Serial.println("Car test!");
pwm.begin();//初始化
pwm.motorConfig(DIRP,DIRP,DIRP,DIRP);//设置电机正方向,参数:DIRN,DIRP
}
void loop() {
/*控制单个电机M3转动,速度1000
M3:电机编号,包括M1,M2,M3,M4
1000:速度值,取值范围在-4096-4096,负数表示反转,正数表示正转,绝对值越大表示速度越快
*/
pwm.setMotor(M3, 1000);
delay(500);
/*控制所有电机转动,速度3000
1000:速度值,取值范围在-4096-4096,负数表示反转,正数表示正转,绝对值越大表示速度越快
*/
pwm.setAllMotor(3000);
delay(500);
/*分别控制所有电机转动,速度1000,速度值可不同
1000:速度值,取值范围在-4096-4096,负数表示反转,正数表示正转,绝对值越大表示速度越快
*/
pwm.setAllMotor(1000, 1000, 1000, 100);
delay(500);
/*控制所有电机停止
*/
pwm.stopMotor(MAll);
delay(500);
/*控制S2号引脚输出高电平
2:引脚编号,包括1,2,3,4或S1,S2,S3,S4分别对应板子上的S1,S2,S3,S4
HIGH:高低电平;HIGH表示高电平,LOW表示低电平
*/
pwm.digitalWrite(2,HIGH);
/*驱动S1端口的舵机转到200的位置
1:引脚编号,包括1,2,3,4或S1,S2,S3,S4分别对应板子上的S1,S2,S3,S4
200:舵机转动的位置,范围在100-400,对应0度到180度
*/
pwm.setServoPulse(1, 200);
delay(1500);
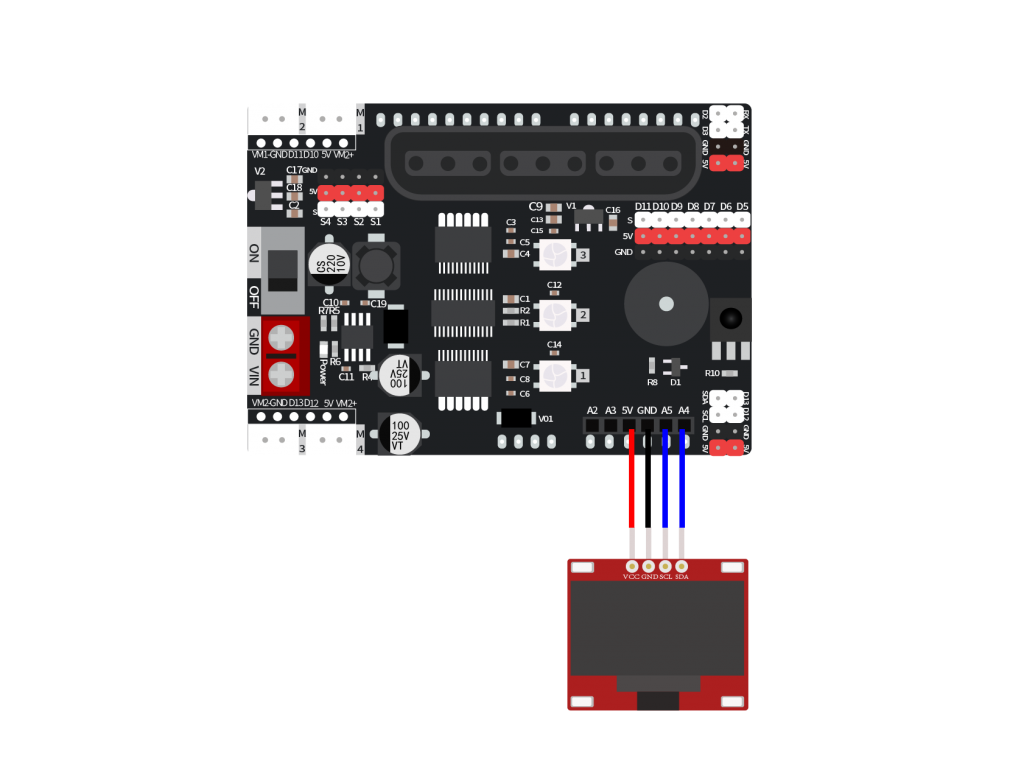
}OLED显示屏测试
电机驱动扩展板将未使用的模拟引脚用排母引出,靠右可用作OLED接口连接OLED屏。
Arduino IDE程序
#include <U8g2lib.h>
#include <Wire.h>
U8G2_SSD1306_128X64_NONAME_1_HW_I2C u8g2(U8G2_R0, U8X8_PIN_NONE);
void page1() {
u8g2.setFont(u8g2_font_timR14_tf);
u8g2.setFontPosTop();
u8g2.setCursor(0,20);
u8g2.print("OPENJUMPER");
u8g2.setCursor(7,34);
u8g2.print("OLED TEST");
}
void setup(){
u8g2.setI2CAddress(0x3C*2);
u8g2.begin();
u8g2.enableUTF8Print();
}
void loop(){
u8g2.firstPage();
do
{
page1();
}while(u8g2.nextPage());
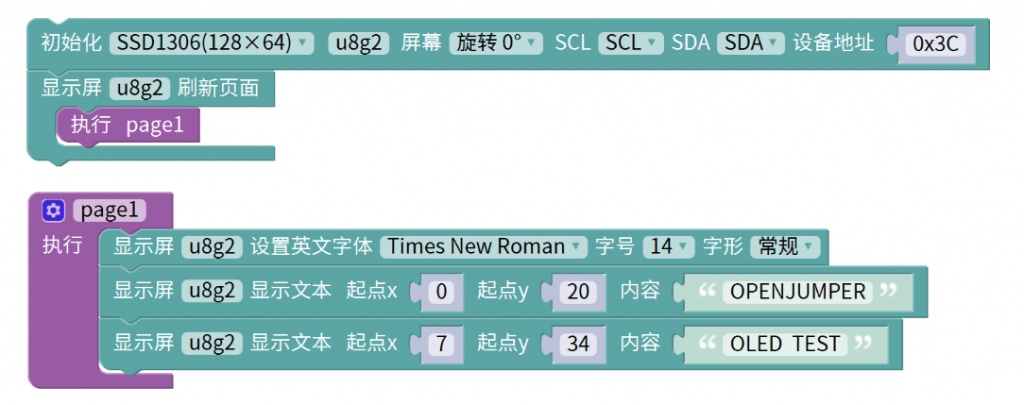
}Mixly图形化程序
PS2手柄遥控测试
#include "Emakefun_MotorDriver.h"
Emakefun_MotorDriver mMotorDriver = Emakefun_MotorDriver(0x60, MOTOR_DRIVER_BOARD_V5);;
PS2X *ps2x;
RGBLed *rgb;
void setup()
{
Serial.begin(9600);
ps2x = mMotorDriver.getSensor(E_PS2X);
rgb = mMotorDriver.getSensor(E_RGB);
}
void loop()
{
static int vibrate = 0;
byte PSS_X = 0, PSS_Y = 0;
ps2x->read_gamepad(false, vibrate); // read controller and set large motor to spin at 'vibrate' speed
if (ps2x->ButtonDataByte()) {
if (ps2x->Button(PSB_PAD_UP)) { //will be TRUE as long as button is pressed
rgb->SetRgbColor(E_RGB_ALL, RGB_WHITE);
Serial.println("PSB_PAD_UP");
}
if (ps2x->Button(PSB_PAD_RIGHT)) {
Serial.println("PSB_PAD_RIGHT");
rgb->SetRgbColor(E_RGB_RIGHT, RGB_WHITE);
}
if (ps2x->Button(PSB_PAD_LEFT)) {
rgb->SetRgbColor(E_RGB_LEFT, RGB_WHITE);
Serial.println("PSB_PAD_LEFT");
}
if (ps2x->Button(PSB_PAD_DOWN)) {
rgb->SetRgbColor(E_RGB_ALL, RGB_RED);
Serial.println("PSB_PAD_DOWN");
}
vibrate = ps2x->Analog(PSAB_CROSS); //this will set the large motor vibrate speed based on how hard you press the blue (X) button
if (ps2x->Button(PSB_CROSS)) { //will be TRUE if button was JUST pressed OR released
rgb->SetRgbColor(E_RGB_LEFT, RGB_GREEN);
Serial.println("PSB_CROSS");
}
if (ps2x->Button(PSB_TRIANGLE)) {
rgb->SetRgbColor(E_RGB_RIGHT, RGB_GREEN);
Serial.println("PSB_TRIANGLE");
}
if (ps2x->Button(PSB_CIRCLE)) {
rgb->SetRgbColor(E_RGB_LEFT, RGB_BLUE);
Serial.println("PSB_CIRCLE");
}
if (ps2x->Button(PSB_SQUARE)) {
rgb->SetRgbColor(E_RGB_RIGHT, RGB_BLUE);
Serial.println("PSB_SQUARE");
}
if (ps2x->Button(PSB_L1) || ps2x->Button(PSB_R1)) {
Serial.print("Stick Values:");
Serial.print(ps2x->Analog(PSS_LY), DEC); //Left stick, Y axis. Other options: LX, RY, RX
Serial.print(",");
Serial.print(ps2x->Analog(PSS_LX), DEC);
Serial.print(",");
Serial.print(ps2x->Analog(PSS_RY), DEC);
Serial.print(",");
Serial.println(ps2x->Analog(PSS_RX), DEC);
}
}
delay(50);
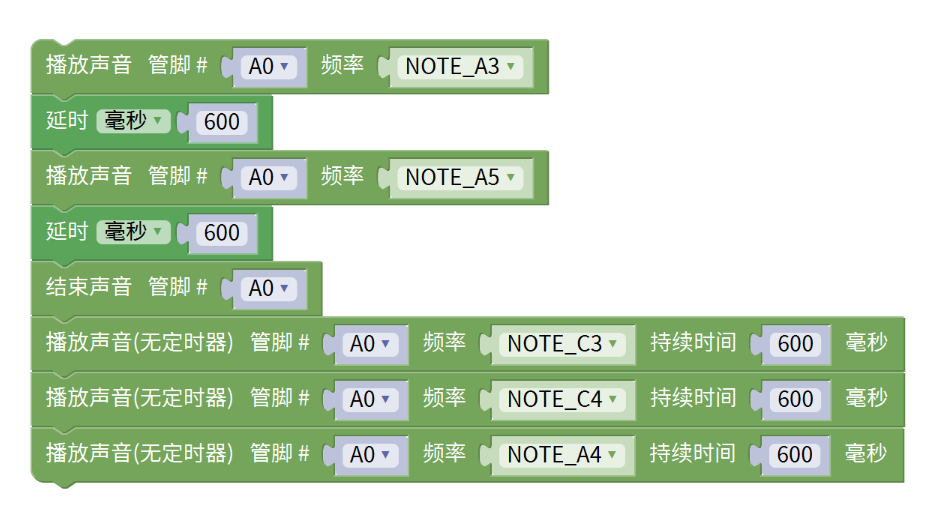
}蜂鸣器测试
Arduino IDE程序
#include <NewTone.h>
void setup(){
pinMode(A0, OUTPUT);
}
void loop(){
tone(A0,220);
delay(600);
tone(A0,880);
delay(600);
noTone(A0);
NewTone(A0,131,600);
NewTone(A0,262,600);
NewTone(A0,440,600);
}Mixly图形化程序
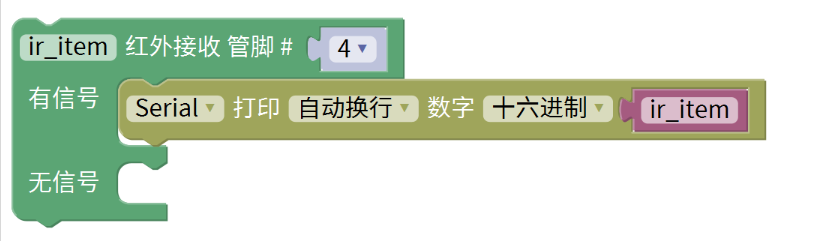
红外接收测试
Arduino IDE程序
//程序上传完成后,点击右上角串口监视器,使用红外遥控器对准板子红外接收头按下,即可看到打印出的键值数据
#include <IRremote.h>
long ir_item;
IRrecv irrecv_4(4);
decode_results results_4;
void setup(){
Serial.begin(9600);
irrecv_4.enableIRIn();
}
void loop(){
if (irrecv_4.decode(&results_4)) {
ir_item=results_4.value;
String type="UNKNOWN";
String typelist[18]={"UNUSED", "RC5", "RC6", "NEC", "SONY", "PANASONIC", "JVC", "SAMSUNG", "WHYNTER", "AIWA_RC_T501", "LG", "SANYO", "MITSUBISHI", "DISH", "SHARP", "DENON", "PRONTO", "LEGO_PF"};
if(results_4.decode_type>=1&&results_4.decode_type<=17){
type=typelist[results_4.decode_type];
}
Serial.println("IR TYPE:"+type+" ");
Serial.println(ir_item,HEX);
irrecv_4.resume();
} else {
}
}Mixly图形化程序
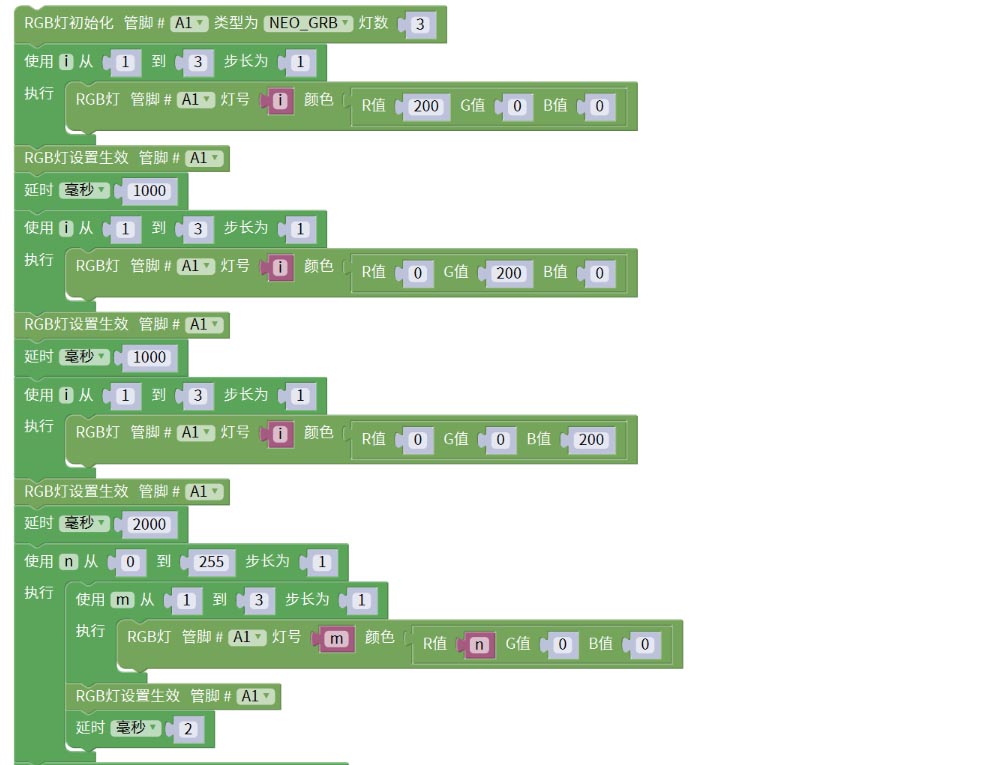
WS2812灯测试
Arduino IDE程序
Adafruit_NeoPixel rgb_display_A1 = Adafruit_NeoPixel(3,A1,NEO_GRB + NEO_KHZ800);//声明一个RGB灯对象
uint32_t Wheel(byte WheelPos){
if(WheelPos < 85){
return rgb_display_A1.Color(WheelPos * 3, 255 - WheelPos * 3, 0);
}
else if(WheelPos < 170){
WheelPos -= 85;
return rgb_display_A1.Color(255 - WheelPos * 3, 0, WheelPos * 3);
}
else{
WheelPos -= 170;
return rgb_display_A1.Color(0, WheelPos * 3, 255 - WheelPos * 3);
}
}
void rainbow(uint8_t wait){
uint16_t i, j;
for(j=0; j<256; j++){
for(i=0; i<rgb_display_A1.numPixels(); i++){
rgb_display_A1.setPixelColor(i, Wheel((i+j) & 255));
}
rgb_display_A1.show();
delay(wait);
}
}
void setup(){
rgb_display_A1.begin();//初始化RGB灯
}
void loop(){
for (int i = 1; i <= 3; i = i + (1)) {
rgb_display_A1.setPixelColor((i)-1, ((200 & 0xffffff) << 16) | ((0 & 0xffffff) << 8) | 0);
}
rgb_display_A1.show();//每次改变RGB灯显示颜色、亮度、灯数或其他数据后需要发送改变后的数据
delay(1000);
for (int i = 1; i <= 3; i = i + (1)) {
rgb_display_A1.setPixelColor((i)-1, ((0 & 0xffffff) << 16) | ((200 & 0xffffff) << 8) | 0);
}
rgb_display_A1.show();
delay(1000);
for (int i = 1; i <= 3; i = i + (1)) {
rgb_display_A1.setPixelColor((i)-1, ((0 & 0xffffff) << 16) | ((0 & 0xffffff) << 8) | 200);
}
rgb_display_A1.show();
delay(2000);
for (int n = 0; n <= 255; n = n + (1)) {
for (int m = 1; m <= 3; m = m + (1)) {
rgb_display_A1.setPixelColor((m)-1, ((n & 0xffffff) << 16) | ((0 & 0xffffff) << 8) | 0);
}
rgb_display_A1.show();
delay(2);
}
for (int n = 0; n <= 255; n = n + (1)) {
for (int m = 1; m <= 3; m = m + (1)) {
rgb_display_A1.setPixelColor((m)-1, (((255 - n) & 0xffffff) << 16) | ((0 & 0xffffff) << 8) | 0);
}
rgb_display_A1.show();
delay(2);
}
for (int n = 0; n <= 255; n = n + (1)) {
for (int m = 1; m <= 3; m = m + (1)) {
rgb_display_A1.setPixelColor((m)-1, ((0 & 0xffffff) << 16) | ((n & 0xffffff) << 8) | 0);
}
rgb_display_A1.show();
delay(2);
}
for (int n = 0; n <= 255; n = n + (1)) {
for (int m = 1; m <= 3; m = m + (1)) {
rgb_display_A1.setPixelColor((m)-1, ((0 & 0xffffff) << 16) | (((255 - n) & 0xffffff) << 8) | 0);
}
rgb_display_A1.show();
delay(2);
}
for (int n = 0; n <= 255; n = n + (1)) {
for (int m = 1; m <= 3; m = m + (1)) {
rgb_display_A1.setPixelColor((m)-1, ((0 & 0xffffff) << 16) | ((0 & 0xffffff) << 8) | n);
}
rgb_display_A1.show();
delay(2);
}
for (int n = 0; n <= 255; n = n + (1)) {
for (int m = 1; m <= 3; m = m + (1)) {
rgb_display_A1.setPixelColor((m)-1, ((0 & 0xffffff) << 16) | ((0 & 0xffffff) << 8) | (255 - n));
}
rgb_display_A1.show();
delay(2);
}
rainbow(20);
}Mixly图形化程序
其他资料
原理图下载
Arduino库文件下载
接口测试程序下载 提取码: ndgh